
Joshua Borsman · 2019
Pendu
lum
Inverted Pendulum 00001
A motorised kinetic installation where control theory meets living space.

- θ̈Angular Acceleration
- θAngular Displacement from Equilibrium
- lLength of Pendulum
- gStandard Gravity
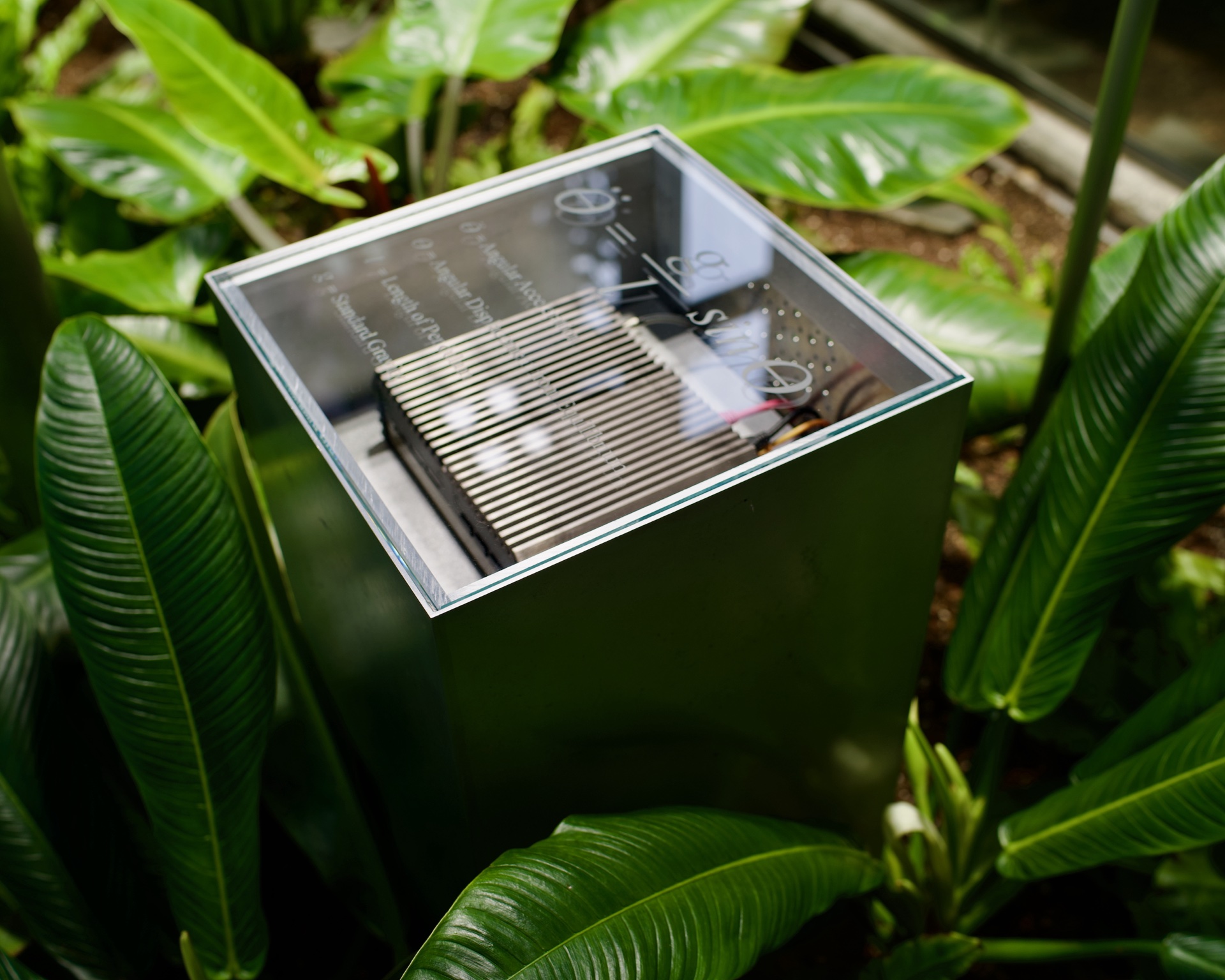
Inverted Pendulum 00001 is a kinetic sculpture by Joshua Borsman, built in 2019. A motorised arm is held in unstable equilibrium by a real-time control system Borsman wrote from scratch; the governing equation is etched into the glass lid of its base.
The installation has three parts: the pendulum, a vision system, and a structural enclosure housing the compute, data collection, and microcontroller. The vision system performs real-time human skeletal estimation and locates a visitor's position in space relative to the pendulum — as someone moves through the room, the arm turns to follow them. Field recordings of Pacific Northwest spring birdsong play around the visitor as the pendulum tracks them.
Borsman developed the work with Samuel Stubblefield, whose graphic design and design charrettes informed the typography of the equation and the form of the sensor housing. The steel and carbon fibre structure was fabricated and welded by Joe Clark.
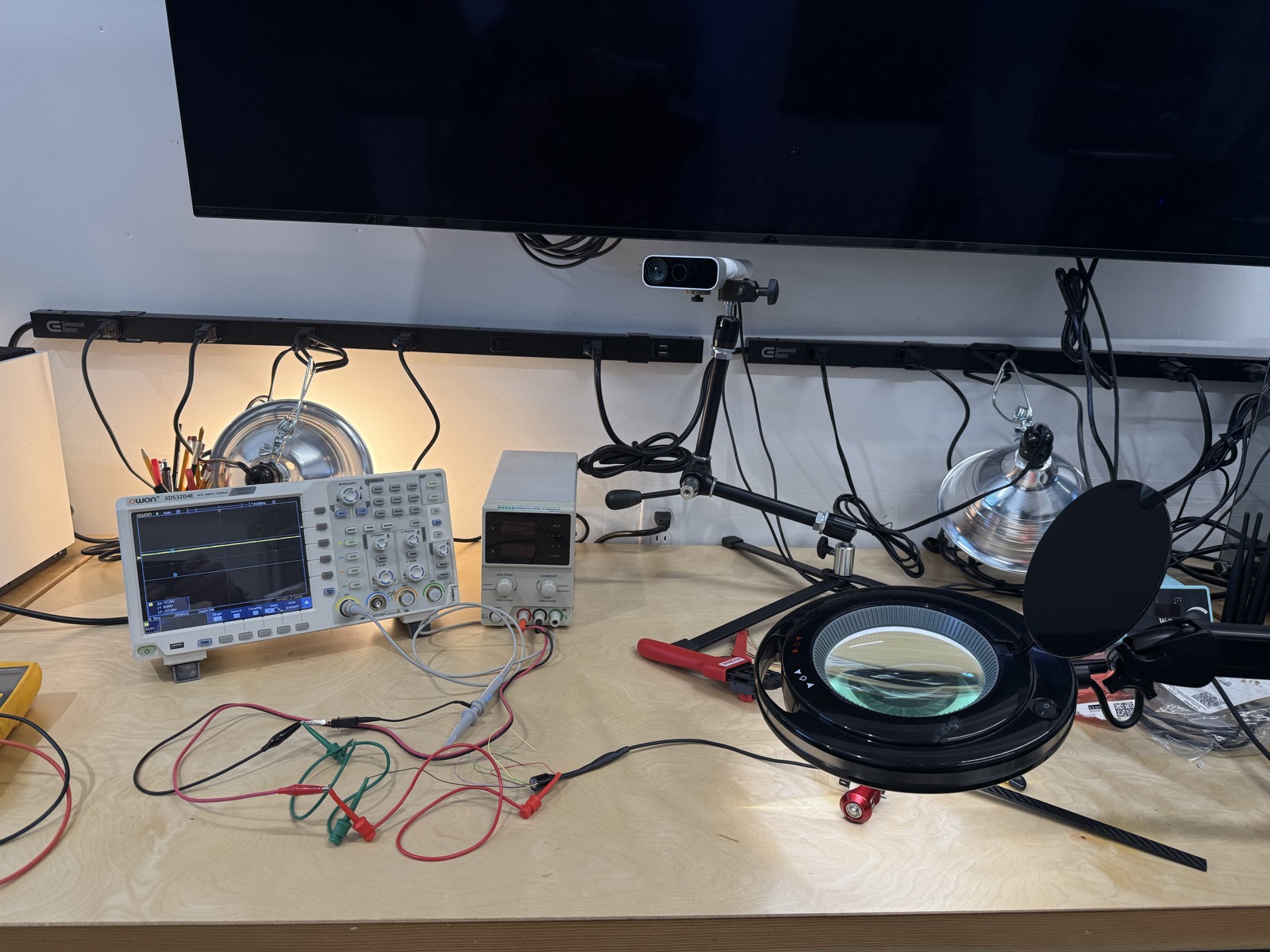
These photographs document a 2026 repair — motor serviced, control system re-tuned, Simulink model updated — before the work returned to its home in an indoor garden.
The Installation
14 photographs











The Unstable
Equilibrium
The inverted pendulum is one of the canonical problems in control engineering — a system that is inherently unstable and will fall unless a control loop continuously intervenes. A hanging pendulum is passively stable: disturb it and it returns to rest. Invert it, and balance has to be actively maintained.
The same mathematics that govern this sculpture — state estimation, feedback control, real-time correction — show up across modern engineering, at scales from prosthetics to spacecraft.
01
Reusable Rockets
Reusable launch vehicles land themselves by solving the same problem at a much larger scale — a tall, top-heavy vehicle balanced on a thrust vector at its base. The flight computer issues hundreds of gimbal corrections per second to hold the rocket upright through turbulence, fuel slosh, and a shifting centre of mass.
02
Bipedal Robotics
Walking robots solve the inverted pendulum problem with every stride. The body falls slightly forward, and the next leg catches it before it tips.
03
Self-Balancing Vehicles
Self-balancing personal vehicles use gyroscopes and accelerometers to stay upright under a rider. Electric unicycles and hoverboards extend the same approach to smaller, faster platforms.
04
Prosthetic Limbs
Microprocessor-controlled prosthetic knees and ankles apply feedback control to a wearer's gait, adapting in real time to smooth each step.
05
High-Rise Structures
Tuned mass dampers in tall buildings counteract wind-induced sway with controlled inertia — some weighing hundreds of tonnes. The building moves; the damper moves in opposition, absorbing the energy before occupants feel it.
06
Satellite Attitude Control
Spacecraft maintain orientation without aerodynamic surfaces using reaction wheels — spinning masses whose angular momentum is traded with the body of the satellite to point it where it needs to look.
Repair, 2026
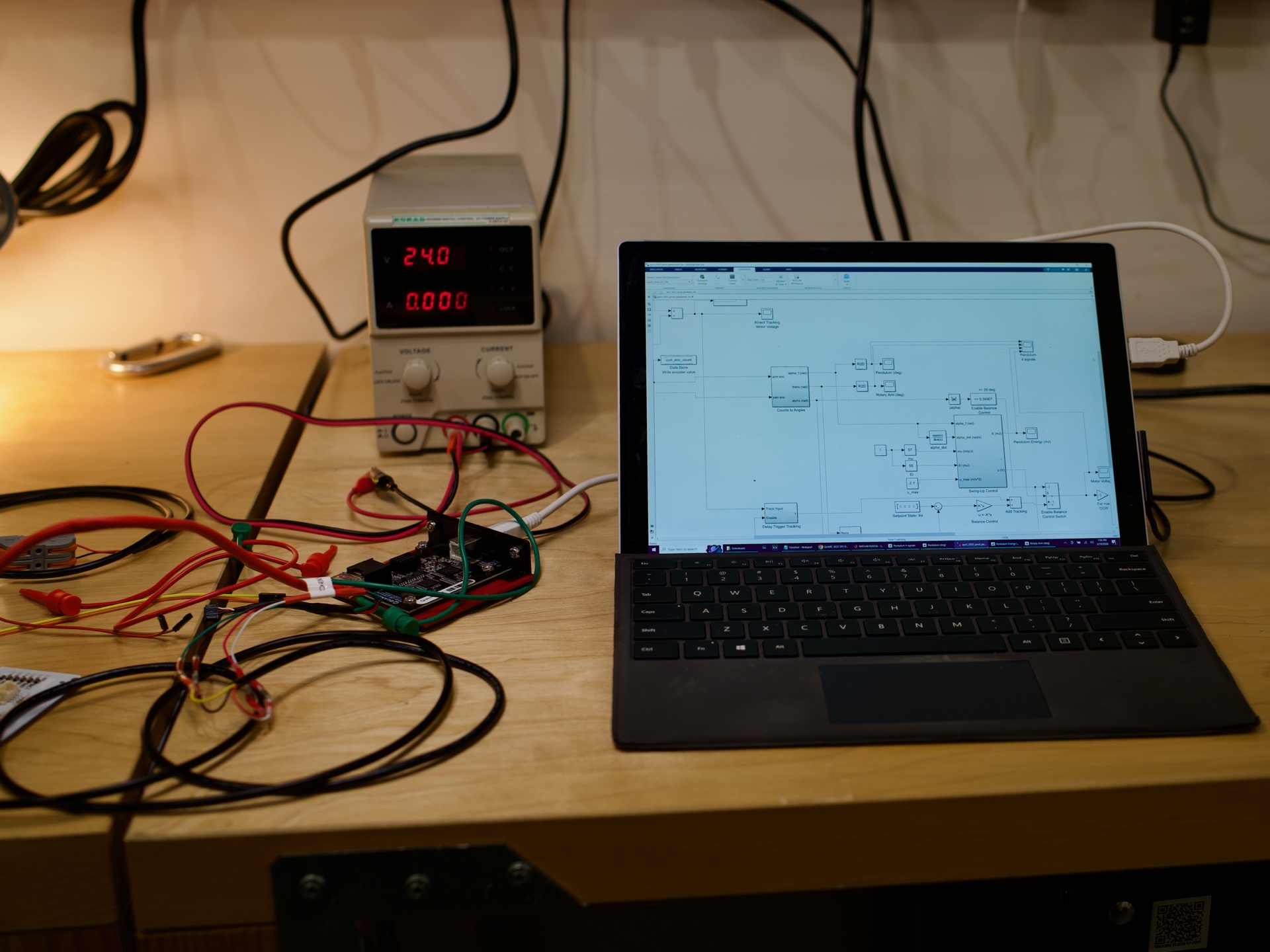
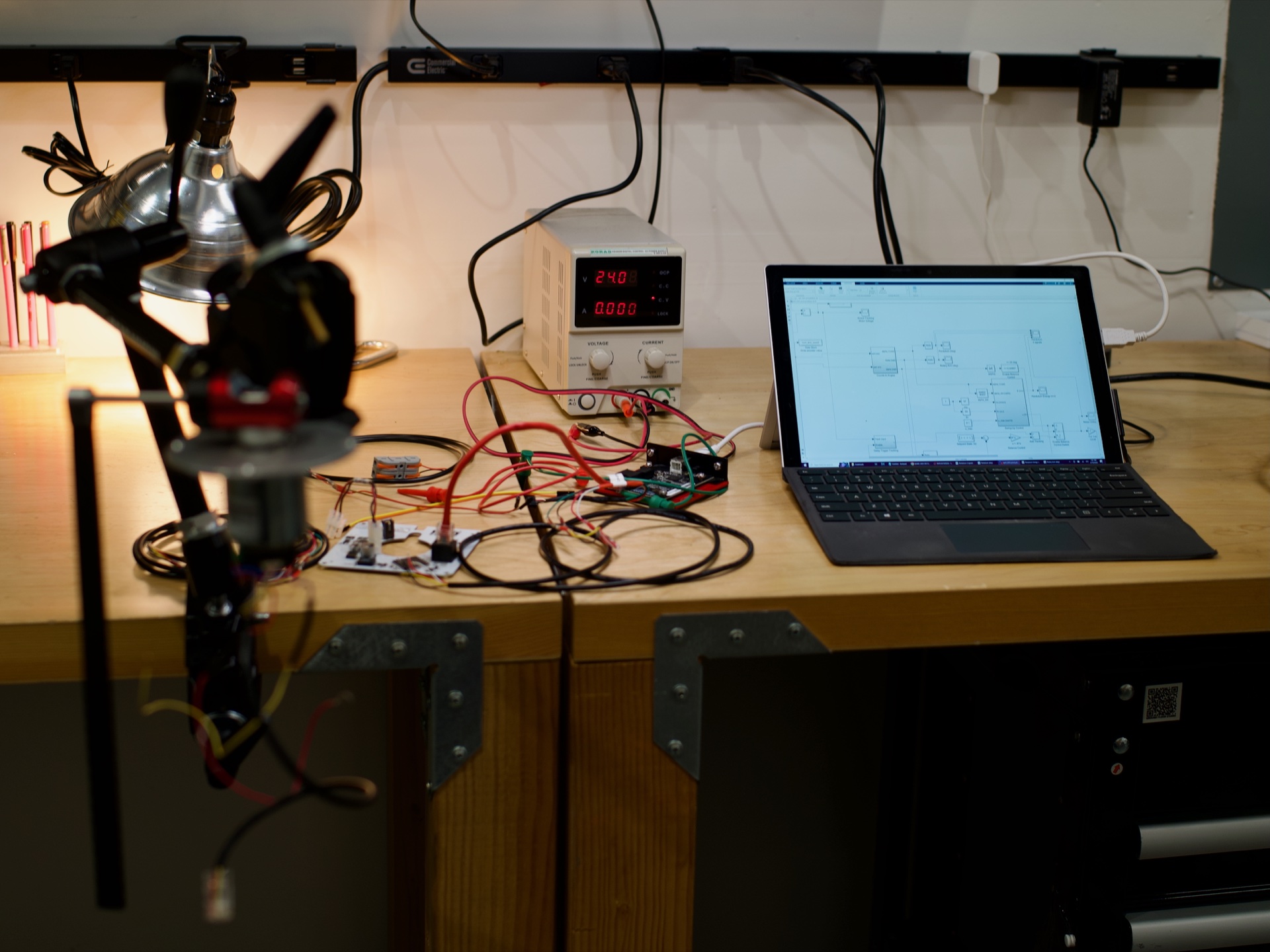
The pendulum was returned to the workshop for maintenance — the motor and gimbal assembly serviced, the Simulink control model updated, and the full system re-commissioned before reinstallation.





Video
Four clips from the 2026 repair and reinstallation.
People behind the work
Joshua
Borsman
- Artist
- Software & control systems
- Interaction design
- Installation parameters
- Field recordings
Samuel
Stubblefield
- Artist
- Collaborative partner
- Graphic design
- Design charrettes
Joe
Clark
- Sculpture fabrication
- Welding
Charna Parkey
For her signal processing expertise — without which Joshua could not have succeeded. Thank you for your patience and brilliance.
John Schoettler
For commissioning the work and for his undying trust and support.